

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Notícia
Página inicial > Notícia > Interface de barramento pode do codificador de eixo fotoelétrico absoluto
2024-04-15
Interface de barramento pode do codificador de eixo fotoelétrico absoluto
1 Introdução O codificador de ângulo de eixo fotoelétrico absoluto é um dispositivo de medição de ângulo digital que mede a posição angular e a velocidade angular do eixo rotativo em tempo real. Ele converte as informações do ângulo do eixo em códigos digitais na forma de graus, minutos e segundos, e a conexão do barramento pode realizar a medição em tempo real. Tem as vantagens de alta confiabilidade de trabalho, forte capacidade anti-interferência, alta precisão, memória de desligamento e assim por diante. É amplamente utilizado em sistemas de rastreamento e posicionamento de medição digital, como equipamentos de gama de tiro, teodolito digital, radar e alguns grandes equipamentos militares.
Nesses sistemas práticos de controle de aplicações, devido às diferentes estruturas de dados dos sensores e detectores de cada subsistema, o codificador de eixo fotoelétrico absoluto usará diferentes métodos de comunicação de dados internos, principalmente incluindo portas seriais de RS232, RS485 / 488, portas paralelas, etc. . No entanto, em aplicações específicas de engenharia, os métodos de comunicação acima são frequentemente limitados pela distância de transmissão e taxa de comunicação. Nos últimos anos, surgiram a comunicação em série rapidamente e surgiram uma variedade de formas de barramento de campo do sistema de controle. O barramento CAN é um dos mais amplamente utilizados. É a abreviação do barramento de rede da área local do controlador e é um suporte eficaz para controle distribuído e controle em tempo real. Rede de comunicação serial. Devido ao alto desempenho, alta confiabilidade e design exclusivo do barramento CAN, ele se tornou o ônibus de campo mais popular e em tempo real em casa e no exterior. O desenvolvimento e as alterações dos métodos de comunicação interna no sistema de controle tornam o codificador usado para medir o deslocamento angular e a velocidade angular fornecem uma interface de barramento CAN para atender aos requisitos de design de campo de todo o sistema de controle.
2 Princípio de trabalho do codificador e transmissão de dados
2.1 Princípio de trabalho O codificador consiste em duas partes: um dispositivo de aquisição de dados e um dispositivo de processamento de dados. O diagrama de blocos estruturais é mostrado em 1. O microcomputador de chip único é a parte central do sistema de circuito do codificador. Depois de coletar os sinais do codificador (código grosso, código fino médio, código fino), ele é subdividido por código fino, correção de canal de código, adição digital, ajuste zero elétrico, processamento de software, como grau, minuto e segunda conversão e, finalmente perceba a interface com o sistema de controle.
2.2 Transmissão de dados A transmissão de dados entre o codificador e o sistema de controle pode ser usada nos modos paralela e serial. A transmissão paralela transmite dados através da porta paralela. Cada dados requer um núcleo do cabo de dados. Por exemplo, um cabo de 24 núcleos é necessário para um codificador de 24 bits. Portanto, o espaço de uso é limitado e é adequado apenas para transmissão de curta distância e requisitos especiais. ocasião. Na transmissão serial, as informações de dados são transmitidas em série através de um par torcido e bits adicionais são adicionados de acordo com diferentes protocolos de comunicação para implementar funções como a correção de erros. Esta função pode ser estendida aos sistemas de barramento de dados. A transmissão serial possui menos fios, menos hardware, baixo custo, longa distância de transmissão e dados seguros e confiáveis.

2.3 Interface de barramento do codificador proposto Na comparação abrangente de vários ônibus de campo, o sistema de comunicação baseado no barramento CAN possui muitas características excelentes: o sinal de dados é transmitido por tensão diferencial; O meio de transmissão do barramento pode usar par torcido, cabo coaxial e fibra óptica; pode funcionar no modo multi-mestre, modo de comunicação flexível; pode transmitir e receber dados no modo de transmissão ponto a ponto, ponto a multiponto e global; As informações do nó na rede podem ser divididas em diferentes prioridades para atender a diferentes requisitos em tempo real; Tecnologia de arbitragem de ônibus não destrutiva; Os dados adotam estrutura de quadro curto, cada quadro é 8byte e a taxa de erro de dados é baixa; A subcamada MAC da camada de link de dados no protocolo de comunicação possui recursos estritos de detecção de erro; Possui padrões internacionais e boa abertura. Portanto, na transformação do modo de comunicação interna do sistema de rastreamento fotoelétrico, o barramento CAN é usado como a estrutura do barramento de comunicação de dados e, em seguida, a interface do barramento do codificador é proposta.
3 Aplicação da interface de barramento do codificador no sistema de rastreamento fotoelétrico
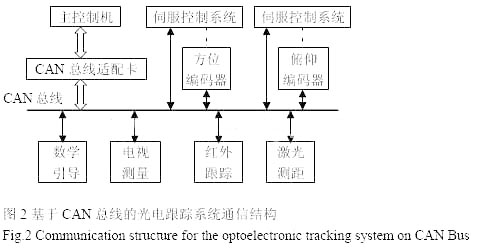
3.1 O codificador é usado para a detecção de posição do sistema de rastreamento fotoelétrico. O codificador fotoelétrico absoluto é um sensor para medir o ângulo de azimute e afinação do sistema de rastreamento fotoelétrico no sistema de rastreamento fotoelétrico. A estrutura interna do barramento do sistema de rastreamento fotoelétrica é transformada no método de comunicação do barramento CAN. A interface do barramento CAN possui as características da interface flexível e economia de linha. Ao mesmo tempo, possui um microprocessador e pode ser usado como um nó inteligente no sistema para enviar quadros remotos diretamente para outros dispositivos para obter controle inteligente. A Figura 2 é um diagrama de estrutura de comunicação do sistema de rastreamento fotoelétrico com base no barramento CAN. O sistema de rastreamento fotoelétrico usa uma única estrutura de barramento serial do barramento CAN em vez da estrutura paralela de múltiplos métodos de comunicação. Os ângulos de azimute e afinação medidos pelos dois codificadores fotoelétricos são enviados para a máquina de controle principal através do barramento e a principal máquina de controle processa os dados de acordo. Através do sistema de controle de servo de controle de barramento, todos os subsistemas podem ser conectados juntos por um par de pares torcidos, o que simplifica a fiação do sistema, melhora a utilização geral do barramento do sistema, a transmissão de dados em tempo real e a escalabilidade do sistema e o erro de bits A taxa é muito reduzida.
3.2 Nó do codificador CAN Interface Composição de hardware
A interface do barramento CAN é composta principalmente por microcomputador de chip único, controlador de barramento pode, motorista de barramento e hardware de isolamento fotoelétrico. O circuito específico da interface de comunicação do barramento CAN é mostrado na Figura 3.
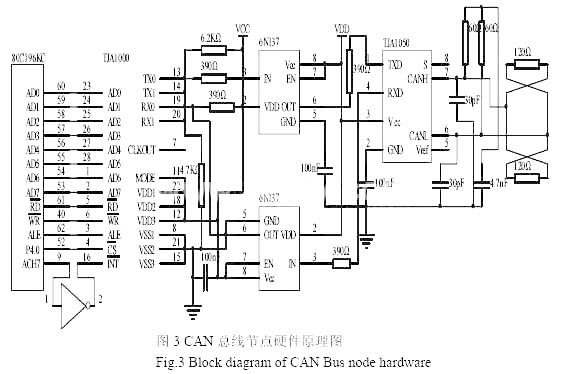
O computador de chip único seleciona o Intel80C196KC, que é um microcontrolador incorporado de 16 bits, que é mais adequado para ocasiões complexas de controle em tempo real. Também é responsável pelo processamento de dados do codificador e pela inicialização do nó do barramento CAN. O controlador CAN seleciona o SJA1000 do Philips Semiconductor para realizar a interface de comunicação de dados entre o barramento e o computador host (Control Computer), suporta os protocolos Can2.0a e Can2.0b, possui um buffer de recebimento de 64 bytes estendido e suporta o primeiro a partir do primeiro -Princípio (FIFO), suporta códigos de identificação de 11 e 29 bits, a taxa de bits de comunicação de até 1Mbps, pode funcionar no modo básico e no modo Pelican. O motorista CAN Bus escolhe Philips TJA1050, que é um motorista de barramento de alta velocidade, que fornece a interface entre o controlador CAN e o barramento físico, realiza as funções de transmissão e recepção diferencial do barramento CAN e possui uma ampla faixa de modo comum Sob forte capacidade de recebimento diferencial de interferência eletromagnética, o nível de entrada é compatível com dispositivos de 3,3V e nós não de energia não interferirão no barramento. A união do TJA1050 pode garantir uma comunicação de dados de alta velocidade. Para segurança e capacidade anti-campeão aprimorada, o uso de TJA1050 Boas características de desempenho simétrico, use terminais separados. Dois pequenos capacitores de 30pf são conectados em paralelo entre o CANH e o CanL e o solo, o que pode filtrar a alta interferência de frequência no barramento e uma certa capacidade de impedir a radiação eletromagnética. Para melhorar ainda mais a capacidade anti-interferência do sistema, é usado um optocuplador 6N137 de alta velocidade entre o controlador CAN SJA1000 e o lAN TJA1050 para formar um circuito de isolamento para obter isolamento galvânico. A fonte de alimentação VCC e VDD em ambos os lados do 6N137 são completamente isolados, o que pode impedir o circuito ao mesmo tempo, dois resistores de correspondência de impedância de barramento de 120Ω devem ser conectados nas duas extremidades do barramento.
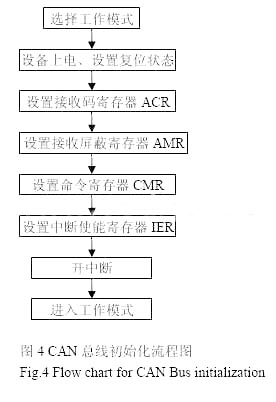
3.3 Software Node Design As informações do ângulo (graus, minutos e segundos) do codificador fotoelétrico absoluto são enviadas do controlador CAN para o barramento CAN ou do barramento CAN para o buffer pode receber automaticamente pelo controlador de barramento SJA1000. Seu programa de comunicação de interface de barramento CAN é composto de subprograma de inicialização, enviando subprograma e recebendo subprograma. Primeiro, selecione o modo de trabalho de barramento CAN, de acordo com as necessidades reais do sistema. Aqui, selecione o modo Pelican, oscilador de cristal de 12MHz, a taxa de transmissão de dados do barramento é definida como 500kbits / s, cada nó de barramento deve definir a mesma taxa de transmissão de dados para garantir a comunicação normal. Determine que a conexão física entre SJA1000 e o MCU é confiável e, em seguida, inicialize o controlador SJA1000. No modo de redefinição SJA1000, defina o estado inicial de cada registro. O fluxograma de inicialização é mostrado na Figura 4. A transmissão e a recepção dos dados são realizados pela sub -rotina de envio e pela sub -rotina de recebimento. O ID da mensagem determina o fluxo dos dados do nó. Ao enviar dados, o princípio da configuração do segmento de bits do sinalizador de recepção da ID da mensagem é: o ID correspondente do nó que precisa ser recebido, o bit é 0 e os bits restantes são 1. Ao receber dados, é o oposto. É julgado pela identificação, seja as informações enviadas para si. É recebido, não filtrado.
4. Conclusão
Como um barramento de comunicação em nível de campo, o ônibus pode ter alta confiabilidade e desempenho de custos. O codificador de eixo fotoelétrico absoluto com interface de barramento CAN torna mais flexível para uso em sistemas de controle.
Este artigo é inovador: a interface do barramento CAN do codificador e sua aplicação no sistema de rastreamento fotoelétrico
Compartilhar no:
Enviar Inquérito

Ms. carol Dong
Número De Telefone:86-431-85543703
Fax:86-431---88634119
Celular:+8613894866263
E-mail:sales@encoders.com.cn
Endereço:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Site móvel
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.